5.9. Looking Ahead: CPUs Today
CPU pipelining is one example of instruction-level parallelism (ILP), in which the CPU simultaneously executes multiple instructions in parallel. In a pipelined execution, the CPU simultaneously executes multiple instructions by overlapping their execution in the pipeline. A simple pipelined CPU can achieve a CPI of 1, completing the execution of one instruction every clock cycle. Modern microprocessors typically employ pipelining along with other ILP techniques and include multiple CPU cores to achieve processor CPI values of less than 1. For these microarchitectures, the average number of instructions per cycle (IPC) is the metric commonly used to describe their performance. A large IPC value indicates that a processor achieves a high sustained degree of simultaneous instruction execution.
Transistors are the building blocks of all circuitry on an integrated circuit (a chip). The processing and control units of modern CPUs are constructed from circuits, which are built from subcircuits and basic logic gates that are implemented with transistors. Transistors also implement the storage circuits used in CPU registers and in fast on-chip cache memory that stores copies of recently accessed data and instructions (we discuss cache memory in detail in Chapter 11).
The number of transistors that can fit on a chip is a rough measure of its performance. Moore’s Law is the observation, made by Gordon Moore in 1975, that the number of transistors per integrated circuit doubles about every two years1,2. A doubling in the number of transistors per chip every two years means that computer architects can design a new chip with twice as much space for storage and computation circuitry, roughly doubling its power. Historically, computer architects used the extra transistors to design more complex single processors using ILP techniques to improve overall performance.
5.9.1. Instruction-Level Parallelism
Instruction level parallelism (ILP) is a term for a set of design techniques used to support parallel execution of a single program’s instructions on a single processor. ILP techniques are transparent to the programmer, meaning that a programmer writes a sequential C program but the processor executes several of its instructions simultaneously, in parallel, on one or more execution units. Pipelining is one example of ILP, where a sequence of program instructions execute simultaneously, each in a different pipeline stage. A pipelined processor can execute one instruction per cycle (can achieve an IPC of 1). Other types of microprocessor ILP designs can execute more than a single instruction per clock cycle and achieve IPC values higher than 1.
A vector processor is an architecture that implements ILP through special vector instructions that take one-dimensional arrays (vectors) of data as their operands. Vector instructions are executed in parallel by a vector processor on multiple execution units, each unit performing an arithmetic operation on single elements of its vector operands. In the past, vector processors were often used in large parallel computers. The 1976 Cray-1 was the first vector processor-based supercomputer, and Cray continued to design its supercomputers with vector processors throughout the 1990s. However, eventually this design could not compete with other parallel supercomputer designs, and today vector processors appear primarily in accelerator devices such as graphics processing units (GPUs) that are particularly optimized for performing computation on image data stored in 1D arrays.
Superscalar is another example of an ILP processor design. A superscalar processor is a single processor with multiple execution units and multiple execution pipelines. A superscalar processor fetches a set of instructions from a sequential program’s instruction stream, and breaks them up into multiple independent streams of instructions that are executed in parallel by its execution units. A superscalar processor is an out-of-order processor, or one that executes instructions out of the order in which they appear in a sequential instruction stream. Out-of-order execution requires identifying sequences of instructions without dependencies that can safely execute in parallel. A superscalar processor contains functionality to dynamically create the multiple streams of independent instructions to feed through its multiple execution units. This functionality must perform dependency analysis to ensure the correct ordering of any instruction whose execution depends on the result of a previous instruction in these sequential streams. As an example, a superscalar processor with five pipelined execution units can execute five instructions from a sequential program in a single cycle (can achieve an IPC of 5). However, due to instruction dependencies, it is not always the case that a superscalar processor can keep all of its pipelines full.
Very long instruction word (VLIW) is another ILP microarchitecture design that is similar to superscalar. In VLIW architectures, however, the compiler is responsible for constructing the multiple independent instruction streams executed in parallel by the processor. A compiler for a VLIW architecture analyzes the program instructions to statically construct a VLIW instruction that consists of multiple instructions, one from each independent stream. VLIW leads to simpler processor design than superscalar because the VLIW processor does not need to perform dependency analysis to construct the multiple independent instruction streams as part of its execution of program instructions. Instead, a VLIW processor just needs added circuitry to fetch the next VLIW instruction and break it up into its multiple instructions that it feeds into each of its execution pipelines. However, by pushing dependency analysis to the compiler, VLIW architectures require specialized compilers to achieve good performance.
One problem with both superscalar and VLIW is that the degree of parallel performance is often significantly limited by the sequential application programs they execute. Dependencies between instructions in the program limit the ability to keep all of the pipelines full.
5.9.2. Multicore and Hardware Multithreading
By designing single processors that employed increasingly complicated ILP techniques and increasing the CPU clock speed to drive this increasingly complicated functionality, computer architects designed processors whose performance kept pace with Moore’s Law until the early 2000s. After this time, CPU clock speeds could no longer increase without greatly increasing a processor’s power consumption3. This led to the current era of multicore and multithreaded microarchitectures, both of which require explicit parallel programming by a programmer to speed up the execution of a single program.
Hardware multithreading is a single-processor design that supports executing multiple hardware threads. A thread is an independent stream of execution. For example, two running programs each have their own thread of independent execution. These two programs' threads of execution could then be scheduled by the operating system to run "at the same time" on a multithreaded processor. Hardware multithreading may be implemented by a processor alternating between executing instructions from each of its threads' instruction streams each cycle. In this case, the instructions of different hardware threads are not all executed simultaneously each cycle. Instead, the processor is designed to quickly switch between executing instructions from different threads' execution streams. This usually results in a speed-up of their execution as a whole as compared to their execution on a singly threaded processor.
Multithreading can be implemented in hardware on either scalar- or super-scalar type microprocessors. At a minimum, the hardware needs to support fetching instructions from multiple separate instruction streams (one for each thread of execution), and have separate register sets for each thread’s execution stream. These architectures are explicitly multithreaded4 because, unlike superscalar architectures, each of the execution streams is independently scheduled by the operating system to run a separate logical sequence of program instructions. The multiple execution streams could come from multiple sequential programs or from multiple software threads from a single multithreaded parallel program (we discuss multithreaded parallel programming in Chapter 14).
Hardware multithreaded microarchitectures that are based on superscalar processors have multiple pipelines and multiple execution units, and thus they can execute instructions from several hardware threads simultaneously, in parallel, resulting in an IPC value greater than 1. Multithreaded architectures based on simple scalar processors implement interleaved multithreading. These microarchitectures typically share a pipeline and always share the processor’s single ALU (the CPU switches between executing different threads on the ALU). This type of multithreading cannot achieve IPC values greater than 1. Hardware threading supported by superscalar-based microarchitectures is often called simultaneous multithreading (SMT)4. Unfortunately, SMT is often used to refer to both types of hardware multithreading, and the term alone is not always sufficient to determine whether a multithreaded microarchitecture implements true simultaneous or interleaved multithreading.
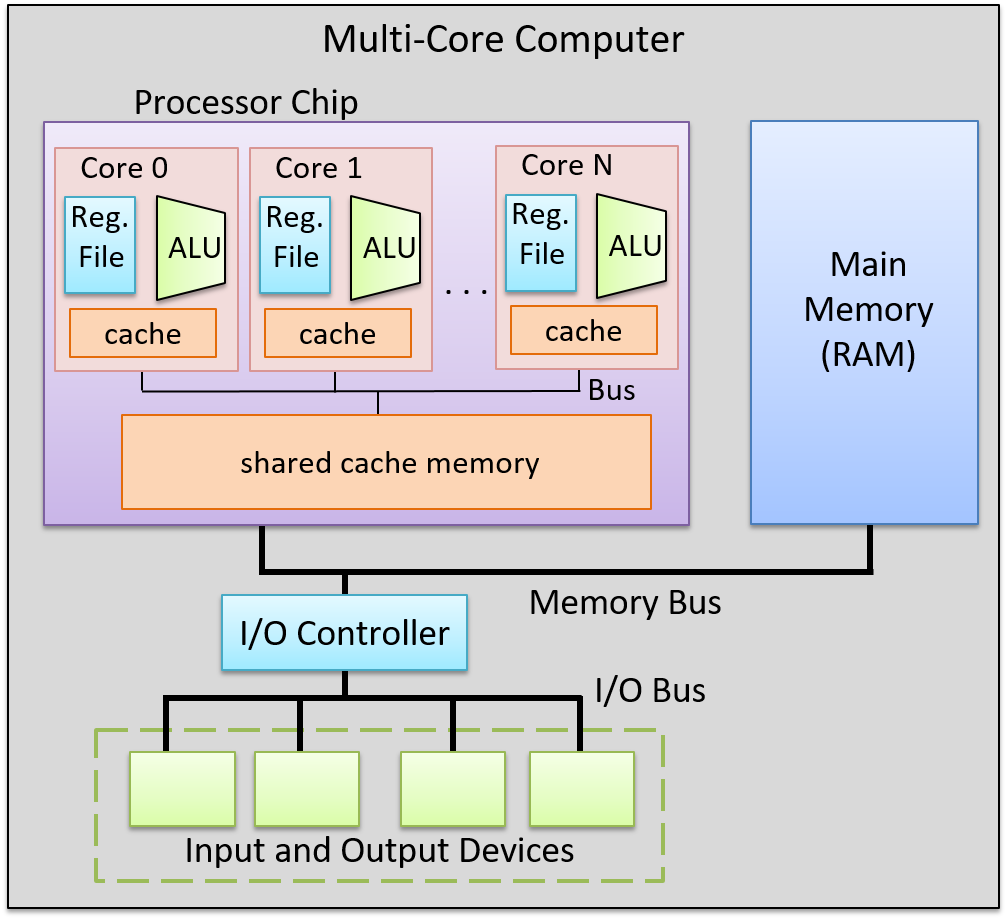
Multicore processors contain multiple complete CPU cores. Like multithreaded processors, each core is independently scheduled by the OS. However, each core of a multicore processor is a full CPU core, one that contains its own complete and separate functionality to execute program instructions. A multicore processor contains replicas of these CPU cores with some additional hardware support for the cores to share cached data. Each core of a multicore processor could be scalar, superscalar, or hardware multithreaded. Figure 1 shows an example of a multicore computer.
Multicore microprocessor design is the primary way in which the performance of processor architectures can continue to keep pace with Moore’s Law without increasing the processor clock rate. A multicore computer can simultaneously run several sequential programs, the OS scheduling each core with a different program’s instruction stream. It can speed up execution of a single program if the program is written as an explicitly multithreaded (software-level threads) parallel program. For example, the OS can schedule the threads of an individual program to run simultaneously on individual cores of the multicore processor, speeding up the execution of the program compared to its execution of a sequential version of the same program. In Chapter 14, we discuss explicit multithreaded parallel programming for multicore and other types of parallel systems with shared main memory.
5.9.3. Some Example Processors
Today, processors are built using a mix of ILP, hardware multithreading, and multicore technologies. In fact, it is difficult to find a processor that is not multicore. Desktop-class processors typically have two to eight cores, many of which also support a low level of per-core multithreading. For example, AMD Zen multicore processors5 and Intel’s hyperthreaded multicore Xeon and Core processors6 both support two hardware threads per core. Intel’s hyperthreaded cores implement interleaved multithreading. Thus, each of its cores can only achieve an IPC of 1, but with multiple CPU cores per chip, the processor can achieve higher IPC levels.
Processors designed for high-end systems, such as those used in servers and supercomputers, contain many cores, where each core has a high degree of multithreading. For example, Oracle’s SPARC M7 processor7, used in high-end servers, has 32 cores. Each of its cores has eight hardware threads, two of which can execute simultaneously, resulting in a maximum IPC value of 64 for the processor. The two fastest supercomputers in the world (as of June 2019)8, use IBM’s Power 9 processors9. Power 9 processors have up to 24 cores per chip, and each core supports up to eight-way simultaneous multithreading. A 24-core version of the Power 9 processor can achieve an IPC of 192.
Footnotes and References
-
Moore first observed a doubling every year in 1965, that he then updated in 1975 to every > 2 years, which became known as Moore’s Law.
-
Moore’s Law held until around 2012 when improvements in transistor density began to slow. Moore predicted the end of Moore’s Law in the mid 2020s.
-
"The End of Dennard scaling" by Adrian McMenamin, 2013. https://cartesianproduct.wordpress.com/2013/04/15/the-end-of-dennard-scaling/
-
"A Survey of Processors with Explicit Multithreading", by Ungerer, Robic, and Silc. In ACM Computing Surveys, Vol. 35, No. 1, March 2003, pp. 29–63. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.96.9105&rep=rep1&type=pdf
-
AMD’s Zen Architectures: https://www.amd.com/en/technologies/zen-core
-
Intel’s Xeon and Core processors with Hyper-Threading: https://www.intel.com/content/www/us/en/architecture-and-technology/hyper-threading/hyper-threading-technology.html
-
Oracle’s SPARC M7 Processor: http://www.oracle.com/us/products/servers-storage/sparc-m7-processor-ds-2687041.pdf
-
Top 500 Lists: https://www.top500.org/lists/top500/
-
IBM’s Power 9 Processor: https://www.ibm.com/it-infrastructure/power/power9